1 шт. контроллер шагового двигателя XC602 движения одноосевой программируемый
2 158,96 руб.

Новое поступление

Магазина Changzhou Rattm Motor Co., Ltd. работает с 26.10.2010. его рейтинг составлет 89.79 баллов из 100. В избранное добавили 1541 покупателя. Средний рейтинг торваров продавца 4.6 в продаже представленно 870 наименований товаров, успешно доставлено 2121 заказов. 284 покупателей оставили отзывы о продавце.
Характеристики
*Текущая стоимость 3 145,56 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-21-2026 | 3994.82 руб. | 4074.37 руб. | 4034 руб. |
| Jan-21-2026 | 3239.35 руб. | 3304.29 руб. | 3271.5 руб. |
| Dec-21-2025 | 3931.60 руб. | 4010.1 руб. | 3970.5 руб. |
| Nov-21-2025 | 3900.76 руб. | 3978.32 руб. | 3939 руб. |
| Oct-21-2025 | 3114.24 руб. | 3176.0 руб. | 3145 руб. |
| Sep-21-2025 | 3837.60 руб. | 3914.52 руб. | 3875.5 руб. |
| Aug-21-2025 | 3805.82 руб. | 3881.47 руб. | 3843 руб. |
| Jul-21-2025 | 3774.51 руб. | 3849.4 руб. | 3811.5 руб. |
Описание товара






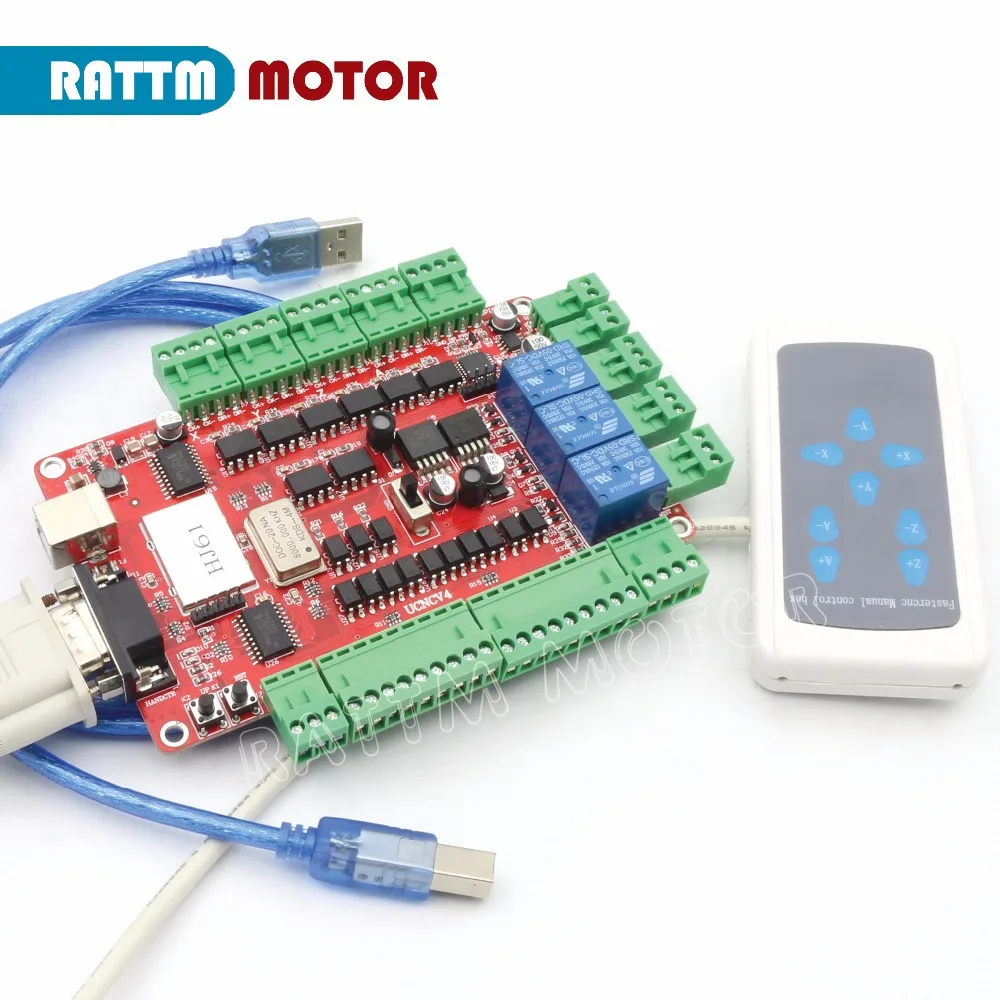
Посылка включает:
1x4 оси USBCNC breakout board
1 х USB кабель
1 х ручка управления
CD включает руководство пользователя на английском языке, программное обеспечение и код регистрации
4 оси USB ЧПУ коммутационная плата обучающее видео ссылка: ddcnc.com/file/usbCNCV4.rar


1. Краткое описание продукции
USBCNCV4.0-это высокопроизводительный контроллер движения, который основан на управлении ПК по USBCNC, система может завершить преобразование от G кода для подключения шагового двигателя сигнала управления движением без необходимости каких-либо дополнительных аппаратных средств и программного обеспечения. Эта плата управления совместима с большинством шаговых драйверов и серводвигателей, это идеальный контроллер, который вместо параллельной платы интерфейса Mach3.
Минимальная конфигурация:
1) ЦП: 1 ГГц
2) память: 512 Мб
3) 500 МБ свободного места на диске
4) графическое устройство DIRECTX9 с WDDM 1,0 или более высоким Драйвером
5) интерфейс USB 2,0
6) сетка 3.5SP1
Рекомендуемая конфигурация:
1) ЦП: 2 ГГц dikaryon
2) Память: 2 Гб;
3) Свободное дисковое пространство 1G
4) графическое устройство DIRECTX9 с WDDM 1,0 или более высоким Драйвером
5) интерфейс USB 2,0
6) сетка 3.5SP1
3. Особенности производства
1. После проверки, версия V4 с использованием Красной платы PCB, размер PCB составляет 135,3*82,5 мм.;
2. Передняя часть узкой кромки с интерфейсом связи USB и интерфейсом ручного управления DB9 для удобства клиентов, изготовленных непосредственно из панели «чехол»;
3. Задний конец узкой кромки-это входной и выходной интерфейс и 3 релейных выходных интерфейса; Реле-это сильный источник помех, реле вдали от конструкции главного чипа управления, это способствует стабильности доски;
4. Одна из двух широких сторон-шаговый двигатель и основной выходной сигнал axiscontrol;
5. Другой стороной двух широких сторон является Аварийная остановка, ручной ввод скорости, ограничение входного интерфейса; Одна сторона для входа, другая сторона режима подключения выхода простая и удобная;
6. 5 В и 12 В модуль питания компактной независимости, безопасности, стабильности;
7. Внешний обеспечивает стабильность системы эффективно работает с кристаллическим активным и основным чипом управления;
8. Размер контура составляет 135,3*82,5 мм, размер отверстия для позиционирования продукта составляет 127*75 мм
9.Программное обеспечение USBCNC, а не mach3, пожалуйста, обратите внимание!
Этот товар прост в эксплуатации для пользователя DIY hobby, но он управляется с помощью usb-порта, поэтому нужно более осторожно устанавливать программное обеспечение, пожалуйста, внимательно прочитайте руководство пользователя и следуйте за нами.




4. Подробное функциональное введение
А. Входное напряжение карты: 15 ~ 36 В;
B. Выходное Рабочее напряжение: 12 В;
C. Выходное напряжение сигнала управления шагового двигателя: 5 В;
D. Внешнее напряжение питания: 12 В;
Примечание: отмеченный 15 ~ 36 В постоянного тока-входной интерфейс, отмеченный 12 В-выходной интерфейс, не может ошибиться в проводке.
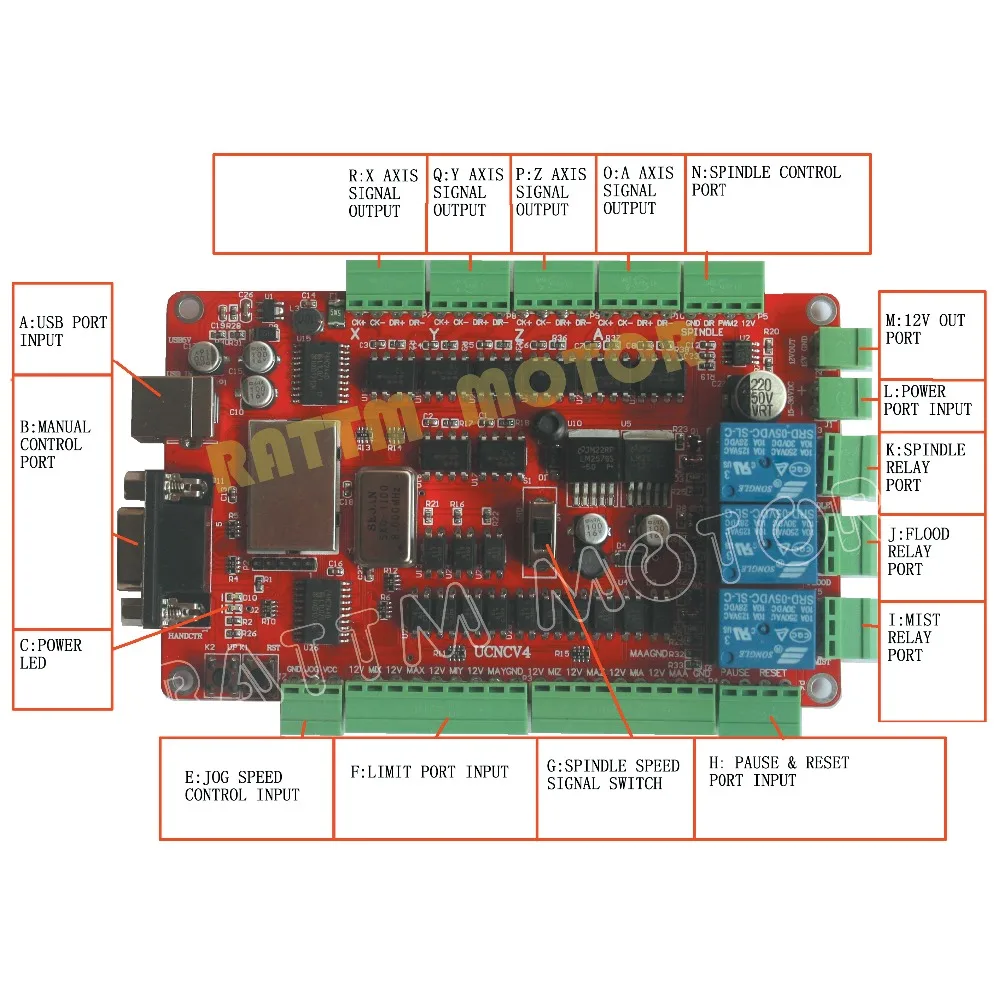
5. Функция и определение каждого модуля
A) USB интерфейс, подключите к компьютеру usb-порт через этот интерфейс, вы можете использовать программное обеспечение usbcnc для управления этой платой, Этот USB интерфейс является квадратным B интерфейсом, пожалуйста, используйте кабель USB2.0 для подключения с защитой и магнитной защитой и длиной не более 2 метров.
B) интерфейс коробки ручного управления, внешняя коробка ручного управления может использовать этот интерфейс для доступа к системе, интерфейс является стандартной формой DB9, ее определение, как показано в следующей таблице.
Таблица 4-1 определение интерфейса ручного управления

C) индикатор питания, как показано на рисунке выше, индикатор D10-это передний индикатор питания USB, этот светильник загорается после подключения usb-порта к компьютеру, d2 ниже-конечный Мощность индикатор светильник, этот светильник также будет гореть, когда работе платы Мощность доступа с ним.
D) Кнопка обновления прошивки платы и кнопка сброса RST, обновление прошивки, поэтому кнопка обновления не должна использоваться, кнопка сброса используется при необходимости перезапуска из-за неисправности платы.
E) ручной интерфейс управления скоростью, режим подключения проводов, как показано на следующем рисунке.
F) ограничительный входной интерфейс. Определения концевого интерфейса перечислены в следующей таблице
Таблица 4-2 определение концевого интерфейса

Концевое соединение переключателя, как показано на рис. 1-8 ~ рис. 1-10
G) переключатель управления шпинделем, как показано на рис. 1-6, переключение переключателя на положение S1 для управления скоростью вращения шпинделя; Переключение переключателя на положение ниже для выходного управления реле тумана.
H) Внешняя пауза и сброс интерфейса; 2 фута отмечены пауза подключения выключателя, 2 фута помечены сброс подключения переключатель сброса.
I) релейный выход программного управления туманом, выход настроек программного обеспечения отмечен 3, определяется сверху вниз, 3 футаNC,Нет,COM.
J) релейный выход управления потоком программного обеспечения, выход отмечен 2 в настройках программного обеспечения, определяемый сверху вниз, 3 футаNC,Нет,COM.
K) выход реле управления программным обеспечением, выход отмечен 1 в настройках программного обеспечения, определяемый сверху вниз, 3 футаNC,Нет,COM.
L) вход рабочей мощности платы, уровень выше отрицательного ниже, как указано на плате, пожалуйста, обратите внимание на вход постоянного тока 15 ~ 36 В, перенапряжение или обратное соединение повредит плату.
M) выходной интерфейс 12 В. Как отмечена плата, GND is -, 12V is +.
N) выходной интерфейс управления шпинделем: определения поворота для GND DIR PWM2 12V, соответственно, это выход сигнала заземления, направления, шпиндель 0 ~ 10V контроль скорости, выход сигнала 12V.
O) выходной сигнал управления шаговым двигателем оси, определение: CK + \ CK-\ DIR + \ DIR-, соответственно, является положительным, отрицательным, направленным, отрицательным, плата использует общий метод подключения анода, поэтому CK + и DIR + соединены вместе, чтобы связаться с 5V на плате, эта плата не поддерживает общий метод подключения катода, Конкретные способы подключения относятся к рис. 1-11. Эта плата не содержит включения управления, теперь большинство драйверов на рынке не должны подключаться к сигналу EN и регулярно работать напрямую по умолчанию.
P) выходной сигнал управления шаговым двигателем оси Z, определение CK + \ CK-\ DIR + \ DIR-, соответственно для импульсного положительного, импульсного отрицательного, направленного положительного, направленного отрицательного, плата использует общий метод подключения анода, поэтому CK + и DIR + соединены вместе с 5V на плате, эта плата не поддерживает общий метод подключения катода.
Q) выходной сигнал управления шаговым двигателем оси Y, определение CK + \ CK-\ DIR + \ DIR-, соответственно для импульсного положительного, импульсного отрицательного, направленного положительного, направленного отрицательного, плата использует общий метод подключения анода, поэтому CK + и DIR + соединены вместе с 5V на плате, эта плата не поддерживает общий метод подключения катода.
R) выход сигнала управления шаговым двигателем оси X, определение CK + \ CK-\ DIR + \ DIR-, соответственно для импульсного положительного, импульсного отрицательного, направленного положительного, направленного отрицательного, плата использует общий метод подключения анода, поэтому CK + и DIR + соединены вместе с 5V на плате, эта плата не поддерживает общий метод подключения катода.

Смотрите так же другие товары: