
Устройство для проверки параметров транзисторов 1 шт. MOS/PNP/NPN L/C/R|esr meter|mega328 transistor
221,48 - 442,96 руб.
Новое поступление

Магазина Manufacturer of Module Store работает с 07.07.2013. его рейтинг составлет 95.06 баллов из 100. В избранное добавили 6139 покупателя. Средний рейтинг торваров продавца 4.8 в продаже представленно 5308 наименований товаров, успешно доставлено 50697 заказов. 13240 покупателей оставили отзывы о продавце.
Характеристики
*Текущая стоимость 47,40 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-23-2026 | 60.11 руб. | 61.47 руб. | 60.5 руб. |
| Jan-23-2026 | 48.58 руб. | 49.83 руб. | 48.5 руб. |
| Dec-23-2025 | 59.17 руб. | 60.66 руб. | 59.5 руб. |
| Nov-23-2025 | 58.50 руб. | 59.65 руб. | 58.5 руб. |
| Oct-23-2025 | 47.61 руб. | 48.4 руб. | 47.5 руб. |
| Sep-23-2025 | 57.49 руб. | 58.72 руб. | 57.5 руб. |
| Aug-23-2025 | 57.83 руб. | 58.63 руб. | 57.5 руб. |
| Jul-23-2025 | 56.52 руб. | 57.16 руб. | 56.5 руб. |
Описание товара


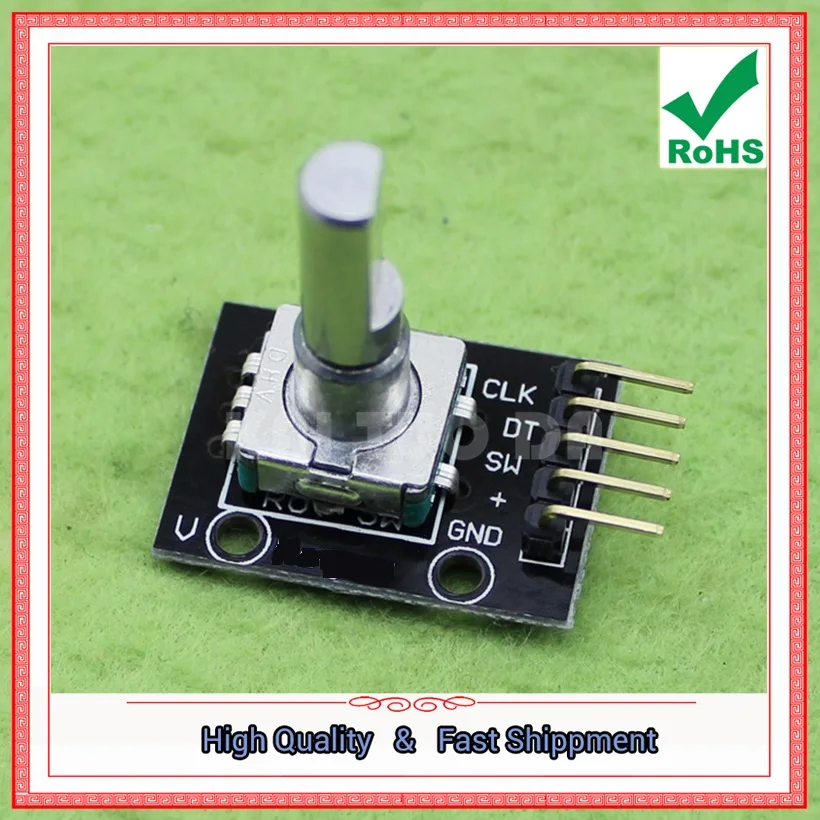
Ar. duino модуль роторного кодировщика KY-040
Рабочее напряжение: 5 В
Количество импульсов: 20
Адрес данных:Http:/Wechat
Роторный кодировщик может считать количество импульсных выходов в прямом и обратном направлениях вращением, и число вращения не похоже на потенциометр. Количество вращения не ограничено. С ключом на поворотном кодере, вы можете сбросить его в исходное состояние, т. Е. От0Начните считать.
Принцип работы:
Инкрементный кодировщик-это роторный датчик, который преобразует вращающееся смещение в ряд цифровых импульсных сигналов. Эти импульсы используются для контроля углового смещения. ВЭлтраПреобразование углового смещения в кодировщик использует принцип фотоэлектрического сканирования. Система считывания основана на вращении радиального диска индексации (кодовый диск), состоящего из чередующихся окон передачи света и непрозрачных окон, и облучена вертикально инфракрасным источником света, И изображение кода проецируется на поверхность приемника приемник покрыт слоем дифракционной решетки, которая имеет ту же ширину окна, что и кодировщик. Работа приемника заключается в том, чтобы почувствовать изменения, которые происходят, когда диск вращается, а затем преобразовать свет меняется в соответствующие электрические изменения. И затем низкоуровневый сигнал на более высокий уровень и не создает помех с квадратным импульсом, который должен использоваться для работы с электронными схемами. Система считывания обычно совпадает с двумя формами сигналов, но разница в фазе180° Для сравнения различных сигналов для улучшения качества и стабильности выходного сигнала. Показания формируются на основе разницы между двумя сигналами, тем самым устраняя помехи.
Инкрементные кодеры даны дваФазовая квадратная волна, их фазовая разница90°, Обычно называетсяAКанал иBПроходу. Один из каналов дает информацию о скорости, в то же время, через два канала сигналов для сравнения, получить информацию о направлении вращения. Также имеется специальный сигналZИли нулевой канал, который дает Абсолютный ноль кодировщика, этот сигнал является квадратной волной иAЛиния прямоугольной волны совпадает.
Есть ошибки в индексации решетки, эксцентричности диска, эксцентричности подшипника, ошибки, введенные электронным считывающим устройством, и неточности оптического сечения. Определите Точность измерительного устройства кодировщика-это степень электричества, точность датчика определяет генерируемую импульсную индексацию кодировщика. Используйте следующее360Электрическая степень означает вращение механического вала, а вращение вала должно быть полным циклом. Чтобы узнать, сколько механического угла эквивалентно электрическому360Степень, можно рассчитать по следующей формуле: электрическая360 =Механический360°/NПульс/Поворот
Ошибка индексации кодировщика выражена как Максимальное смещение двух последовательных разрывов электрических углов. Ошибка присутствует в любом кодере, что вызвано вышеуказанными факторами.ЭлтраМаксимальная погрешность датчика ±25Электрический угол (при любом объявленном состоянии), эквивалентный номинальному смещению ±7%, Что касается разницы в фазах90° (Электрические) двух каналов максимального отклонения ±35Электрическая оценка соответствует номинальному отклонению10%О.
Инкрементный кодировщик сигнала UVW
В дополнение к вышеперечисленным обычным кодерам, есть некоторые инкрементные кодеры, которые интегрированы с другими электрическими выходными сигналами. ПротивUVWИнтегрированный инкрементный кодировщик сигнала-это пример, который обычно используется для обратной связи с серводвигателями переменного тока. Эти полюсные сигналы обычно появляются в серводвигателе переменного тока,UVWСигнал обычно спроектирован путем имитации функции магнитного оригинала. ВЭлтраКодировщик, этиUVWСигналы производятся оптически и появляются в трех квадратных волнах, которые смещаются друг от друга120°. Для того, чтобы облегчить запуск двигателя, Управляйте стартером для двигателя, нужны эти правильные сигналы. ЭтиUVWПолюсные импульсы можно многократно повторять во время вращения механического вала, потому что они напрямую зависят от количества полюсов подключенного двигателя и используются4,6Или более Полярный двигательUVWСигнал.
Ar. duino код теста:
Int redPin = 2;
Int yellowPin = 3;
Int greenPin = 4;
Int aPin = 6;
Int bPin = 7;
Int buttonPin = 5;
Состояние Int = 0;
Int longPeriod = 5000;/Time at green или red
Int короткий период = 700;/период времени при смене
Int targetCount = короткий период;
Int count = 0;
Настройка пустоты ()
{
PinMode (aPin, INPUT);
PinMode (bPin, вход);
PinMode (buttonPin, INPUT);
PinMode (redPin, OUTPUT);
PinMode (йеллоупин, выход);
PinMode (greenPin, OUTPUT);
}
Пустая петля ()
{
Граф + +;
If (digitalRead (buttonPin)
{
Набор ламп (высокий, высокий, высокий);
}
Еще
{
Int изменить = getEncoderTurn ();
Int newPeriod = longPeriod + (изменить * 1000);
If (newPeriod> = 1000 & newPeriod
{
Длительный период = новый период;
}
If (количество> targetCount)
{
SetState ();
Количество = 0;
}
}
Задержка (1);
}
Int getEncoderTurn ()
{
/Возврат-1, 0 или + 1
Статический int oldA = низкий;
Статическое значение int oldB = низкое;
Int результат = 0;
Int newA = digitalRead (aPin);
Int newB = digitalRead (bPin);
If (newA! = OldA | newB! = OldB)
{
/Что-то изменилось
If (oldA = LOW & newA = HIGH)
{
Результат =-(oldB * 2-1);
}
}
OldA = newA;
OldB = newB;
Результат возврата
}
Int setState ()
{
Если (Состояние = 0)
{
Набор ламп (высокий, низкий, низкий);
TargetCount = длительный период;
Состояние = 1;
}
Если (Состояние = 1)
{
Набор ламп (высокий, высокий, низкий);
TargetCount = короткий период;
Состояние = 2;
}
Если (Состояние = 2)
{
Набор ламп (низкий, низкий, высокий);
TargetCount = длительный период;
Состояние = 3;
}
Если (Состояние = 3)
{
Набор ламп (низкий, высокий, низкий);
TargetCount = короткий период;
Состояние = 0;
}
}
Пустая лампа (красный, желтый, зеленый)
{
DigitalWrite (красный, красный);
DigitalWrite (желтый, желтый);
DigitalWrite (зеленый, зеленый);
}
Смотрите так же другие товары:






