


Новое поступление

100% Новый оригинальный AZ1084S2-ADJE1 AZ1084-ADJ TO-263 | Электроника

500 шт. пружины для контроллера PS 5 4 JDM 001 010 030 040 055 | Электроника
774,81 - 965,70 руб.

HMICICAWK Original 100% NEW AP3968M AP3968M-G1 AP3968MTR-G1 AP3968MTR SOP-7 50 шт./лот | Электроника
1 009,87 руб.

100% новое поступление продвижение D43256AC-15L UPC43256AC-15L | Электроника

MJL4302A MJL4302 1 шт. + MJL4281A MJL4281 TO-3PL | Электроника
159,45 руб.

DIP4 100 шт. SFH617A-2X001 SFH617A-3X001 SFH617A-4X001 SFH617A-2X016 SFH617A-3X016 SFH617A-4X016 SFH617A SFH617A-2 SFH617A-3 |
1 871,51 руб.

100% новый и оригинальный ADUM5242ARZ | Электроника
Характеристики
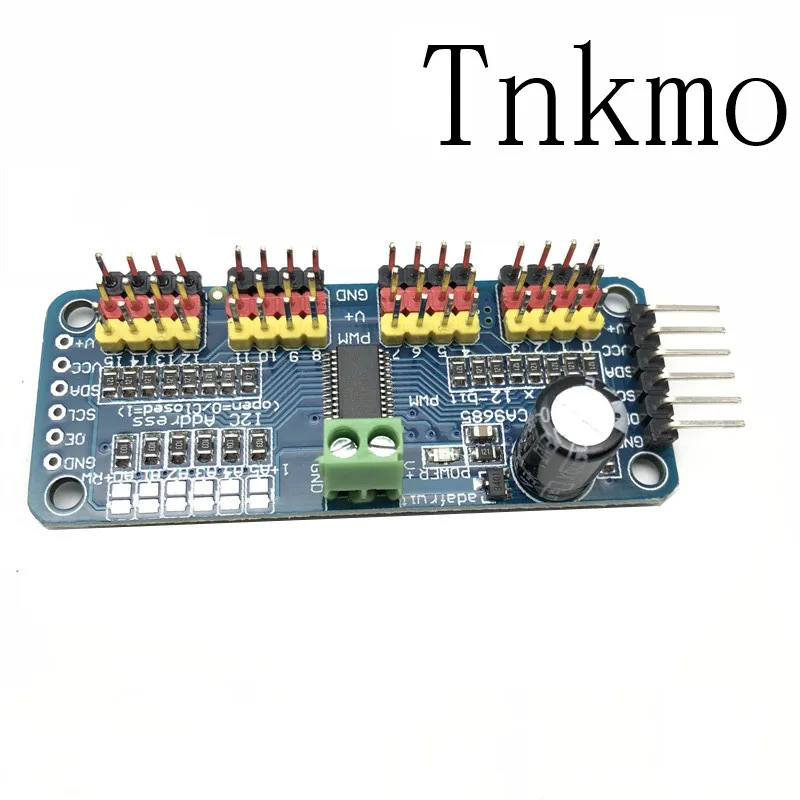
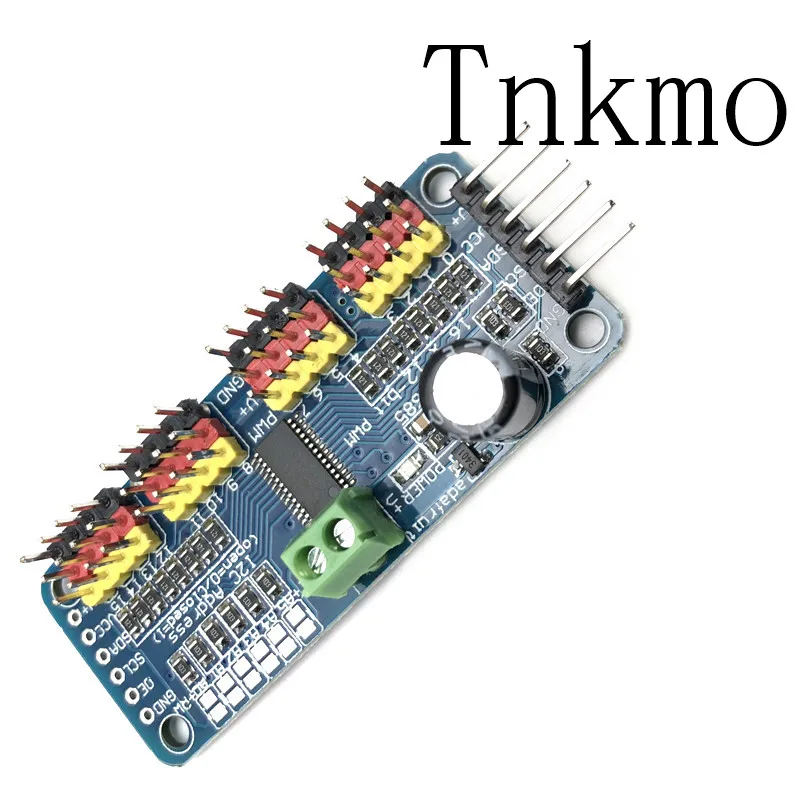
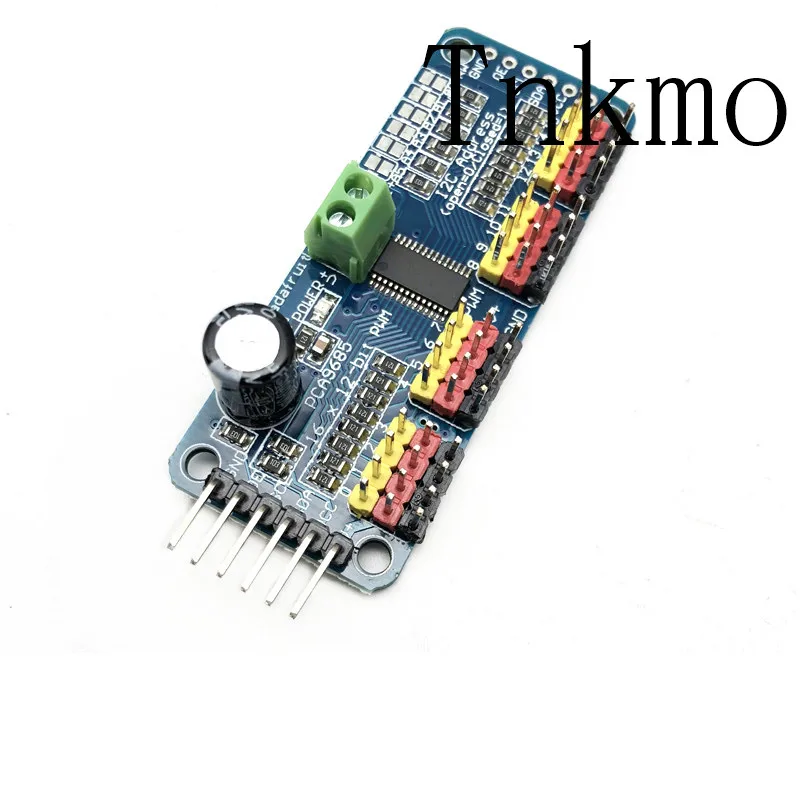
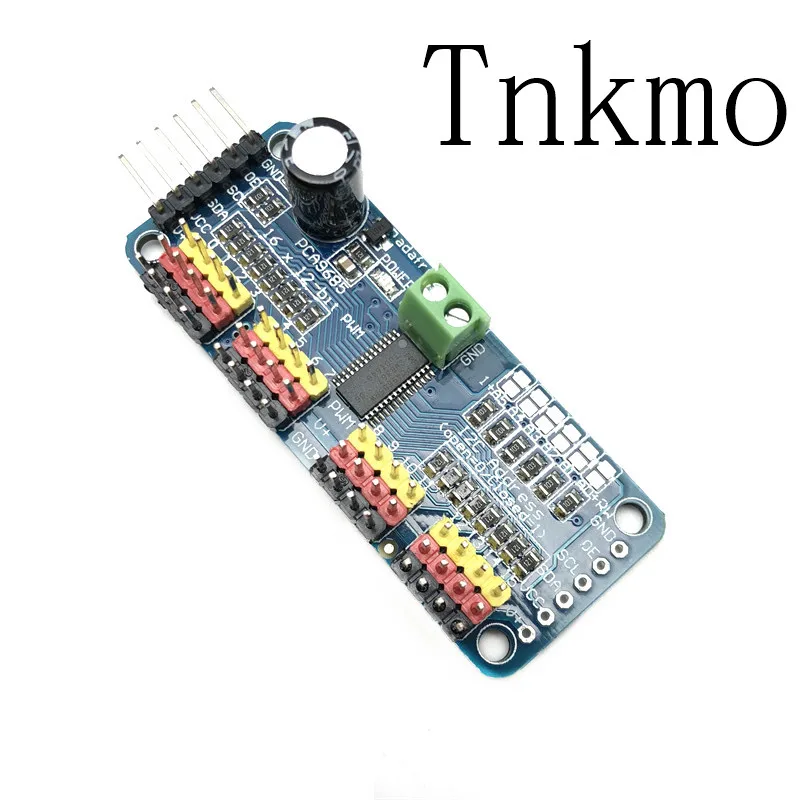
16-канальный 12-битный PWM/Servo Driver-I2C интерфейс PCA9685 модуль для Raspberry Pi щит Servo Щит arduino
История изменения цены
*Текущая стоимость уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-21-2026 | 0.55 руб. | 0.43 руб. | 0 руб. |
| Feb-21-2026 | 0.71 руб. | 0.92 руб. | 0 руб. |
| Jan-21-2026 | 0.89 руб. | 0.33 руб. | 0 руб. |
| Dec-21-2025 | 0.69 руб. | 0.2 руб. | 0 руб. |
| Nov-21-2025 | 0.36 руб. | 0.4 руб. | 0 руб. |
| Oct-21-2025 | 0.20 руб. | 0.68 руб. | 0 руб. |
| Sep-21-2025 | 0.98 руб. | 0.21 руб. | 0 руб. |
| Aug-21-2025 | 0.67 руб. | 0.9 руб. | 0 руб. |
| Jul-21-2025 | 0.48 руб. | 0.65 руб. | 0 руб. |
Описание товара





Хотите сделать ходунки hexapod? Может быть, вы делаете кусок искусства с тоннами движущихся частей, или вам нужно водить тонну светодиодов с точным выходом PWM. Ваш микроконтроллер имеет ограниченное количество выходов PWM, и вы обнаружите, что у вас закончился! Не с 16-канальным 12-битным PWM/сервоприводом Adafruit-I2C интерфейсом. С помощью этого pwm и серводвигателя вы можете управлять 16 свободными выходами PWM всего двумя контактами! Нужно запускать более 16 PWM выходов? Никаких проблем. Цепь вместе до 62 из этих красавиц для выдающихся 992 PWM выходов.
Особенности:
Размеры (без заголовков или клеммных блоков) 2,5 "x 1" x 0,1 "(62,5 мм x 25,4 мм x 3 мм)Вес (без заголовков или клеммных блоков): 5,5 гВес (с 3x4 заголовками и клеммными блоками): 9 граммовЭта плата/Чип использует 7-битный адрес I2C между 0x60-0x80, выбирается с перемычкамиКлеммная колодка для ввода питания (или вы можете использовать 0,1 "поломки на стороне)Защита от обратной полярности на входе клеммного блокаЗеленый Мощный светодиодный3 контактных разъема в 4 группы, так что вы можете подключить 16 сервоприводов сразу (сервовилки немного шире 0,1 ", так что вы можете сложить только 4 рядом друг с другом на 0,1" Заголовок"Цепной" дизайнМесто для размещения большого конденсатора на линии V + (в чехол, который вам нужен)Резисторы серии 220 Ом на всех выходных линиях для их защиты и для тривиального вождения светодиодовПрипой перемычки для 6 адресов выберите контактыI2c-controlled драйвер PWM со встроенными часами. В отличие от семьи TLC5940, вам не нужно непрерывно отправлять сигнал, связывающий ваш микроконтроллер, его полностью свободный запуск!Соответствует 5 В, это означает, что вы можете управлять им с 3,3 В микроконтроллера и по-прежнему безопасно управлять до 6 в выходов (это хорошо, когда вы хотите контролировать белые или синие светодиоды с 3,4 + вперед напряжения)6 адресов выбирают контакты, так что вы можете подключить до 62 из них на одной шине i2c, в общей сложности 992 выходов-это много сервоприводов или светодиодовРегулируемая Частота ШИМ до 1,6 кГц12-битное разрешение для каждого выхода-для сервопривода, это означает, что разрешение 4 US при частоте обновления 60 ГцНастраиваемый push-pull или выход открытого сливаВыход позволяет быстро отключить все выходные данныеИнструкции по использованию:


(1) плата привода, подключенная к Arduino:
Драйвер PWM использует метод I2C, поэтому к устройству Arduino можно подключать только четыре линии:"Классический" Arduino pin режим:+ 5В-> VCCGND -> GNDАналоговый 4 -> SDAАналоговый 5 -> SCLСтарый Мега контактный способ:+ 5В-> VCCGND -> GNDЦифровой 20 -> SDAЦифровой 21 -> SCLR3 и более поздний метод Arduino pin (Uno, Mega &Leonardo):(Эти доски имеют специальные SDA и SCL контакты)+ 5В-> VCCGND -> GNDSDA -> SDASCL -> SCL Штырь VCC предназначен только для источника питания чипа, если вы хотите подключить сервопривод или светодиодный индикатор, используйте источник питания V + pin, V + pin поддерживает источник питания 3,3 ~ 6 в (чип безопасного напряжения 5 В). Рекомендуется подключить внешний источник питания через блок питания.(2) Блок питания:Большая часть напряжения серводвигателя составляет 5 ~ 6 В, особенно в нескольких рулевой механизм одновременно работает, с потребностью в мощном источнике питания. Если вы непосредственно используете pin Arduino 5V для прямого питания сервопривода, есть некоторые ненепредвиденные проблемы, поэтому мы рекомендуем вам иметь подходящий внешний источник питания для платы привода.
Штырь VCC предназначен только для источника питания чипа, если вы хотите подключить сервопривод или светодиодный индикатор, используйте источник питания V + pin, V + pin поддерживает источник питания 3,3 ~ 6 в (чип безопасного напряжения 5 В). Рекомендуется подключить внешний источник питания через блок питания.(2) Блок питания:Большая часть напряжения серводвигателя составляет 5 ~ 6 В, особенно в нескольких рулевой механизм одновременно работает, с потребностью в мощном источнике питания. Если вы непосредственно используете pin Arduino 5V для прямого питания сервопривода, есть некоторые ненепредвиденные проблемы, поэтому мы рекомендуем вам иметь подходящий внешний источник питания для платы привода. (3) Подключите Сервопривод:Большинство серводвигателей подключены с помощью стандартных 3-проводных гнездовых вилок, если соответствующий штырь находится на плате драйвера. (Провод заземления обычно черный или коричневый, сигнальная линия обычно желтая или белая)
(3) Подключите Сервопривод:Большинство серводвигателей подключены с помощью стандартных 3-проводных гнездовых вилок, если соответствующий штырь находится на плате драйвера. (Провод заземления обычно черный или коричневый, сигнальная линия обычно желтая или белая) (4) для платы драйвера указан Адрес:Каждая плата привода каскада должна иметь уникальный адрес доступа. Начальный I2C Адрес каждой платы драйвера составляет 0 × 40, вы можете изменить верхний правый угол адреса перемычки I2C. Подключите перемычку с припоем, чтобы указать бинарный номер «1».
(4) для платы драйвера указан Адрес:Каждая плата привода каскада должна иметь уникальный адрес доступа. Начальный I2C Адрес каждой платы драйвера составляет 0 × 40, вы можете изменить верхний правый угол адреса перемычки I2C. Подключите перемычку с припоем, чтобы указать бинарный номер «1». Плата 0: адрес = 0x40Смещение = binary 00000 (по умолчанию)Плата 1: адрес = 0x41 смещение = binary 00001 (как показано выше, подключено к A0)Плата 2: адрес = 0x42 смещение = binary 00010 (подключение к A1)Плата 3: адрес = 0x43 смещение = binary 00011 (подключение A0 и A1)Плата 4: адрес = 0x44 смещение = binary 00100 (подключение к A2)И так далее.Пример кода:# Включает <провод. h># Включая<Adafruit_PWMServoDriver.h>Adafruit_PWMServoDriver pwm1 =Adafruit_PWMServoDriver (0 × 40);Adafruit_PWMServoDriver pwm2 =Adafruit_PWMServoDriver (0x41);Настройка пустоты () {Серийный. Старт (9600);Серия. println ( "16 каналовPWM тест! ");Pwm1.begin ();Pwm1.setPWMFreq (1600); /Это максимальная частота ШИМPwm2.begin ();Pwm2.setPWMFreq (1600); /Это максимальная частота ШИМ
Плата 0: адрес = 0x40Смещение = binary 00000 (по умолчанию)Плата 1: адрес = 0x41 смещение = binary 00001 (как показано выше, подключено к A0)Плата 2: адрес = 0x42 смещение = binary 00010 (подключение к A1)Плата 3: адрес = 0x43 смещение = binary 00011 (подключение A0 и A1)Плата 4: адрес = 0x44 смещение = binary 00100 (подключение к A2)И так далее.Пример кода:# Включает <провод. h># Включая<Adafruit_PWMServoDriver.h>Adafruit_PWMServoDriver pwm1 =Adafruit_PWMServoDriver (0 × 40);Adafruit_PWMServoDriver pwm2 =Adafruit_PWMServoDriver (0x41);Настройка пустоты () {Серийный. Старт (9600);Серия. println ( "16 каналовPWM тест! ");Pwm1.begin ();Pwm1.setPWMFreq (1600); /Это максимальная частота ШИМPwm2.begin ();Pwm2.setPWMFreq (1600); /Это максимальная частота ШИМ 




Смотрите так же другие товары: