Промышленный двигатель постоянного тока 12 В 24 в 48 12А автоматический ШИМ
820,35 руб.




Новое поступление
Характеристики
*Текущая стоимость 5 639,92 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Feb-20-2026 | 7162.72 руб. | 7305.41 руб. | 7233.5 руб. |
| Jan-20-2026 | 5808.34 руб. | 5924.16 руб. | 5866 руб. |
| Dec-20-2025 | 7049.12 руб. | 7190.98 руб. | 7119.5 руб. |
| Nov-20-2025 | 6992.55 руб. | 7132.30 руб. | 7062 руб. |
| Oct-20-2025 | 5583.39 руб. | 5695.88 руб. | 5639 руб. |
| Sep-20-2025 | 6880.78 руб. | 7018.58 руб. | 6949 руб. |
| Aug-20-2025 | 6823.20 руб. | 6959.52 руб. | 6891 руб. |
| Jul-20-2025 | 6767.89 руб. | 6902.78 руб. | 6834.5 руб. |
Описание товара




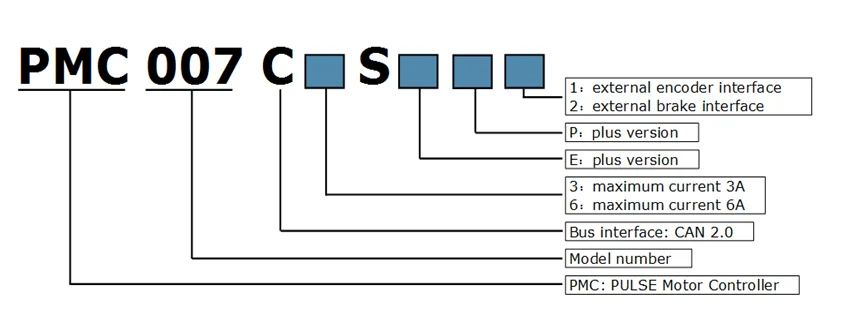
PMC007 является своего рода миниатюрный интегрированный шаговый двигатель микрошаговый контроллер, который может быть непосредственно установлен в задней частиNEMA17/NEMA23/NEMA34Серия шагового двигателя. Контроллер серии предоставляет различные модели, которые могут быть выбраны на основе управления шиной can и различных значений тока. Легко достичь промышленной сети управления до 120 узлов, которые могут достичь замкнутого контроля на основе кодировщика в соответствии с требованиями пользователя. PMC007 принимает промышленный стандартный протокол управления CANOPEN DS301, который не только значительно упрощает сложность системы управления верхним слоем, но и максимально сохраняет гибкость управления и подходит для всех видов высокой точности, широкий спектр использования в промышленности.

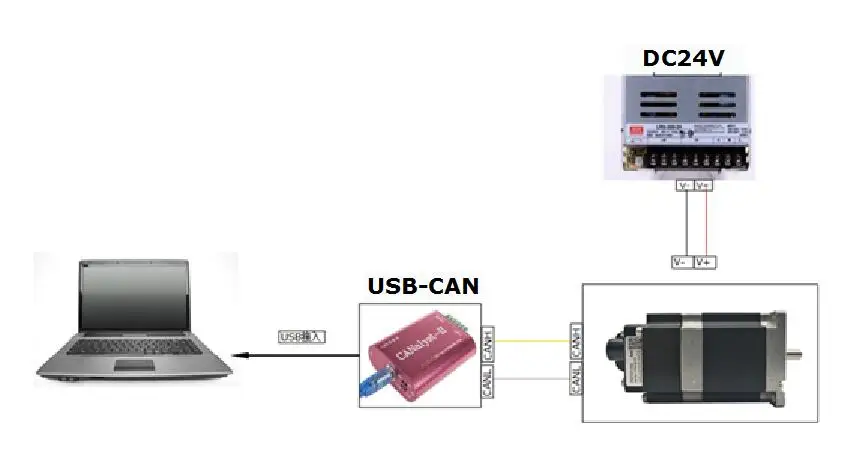
Интеллектуальная сеть CANopen
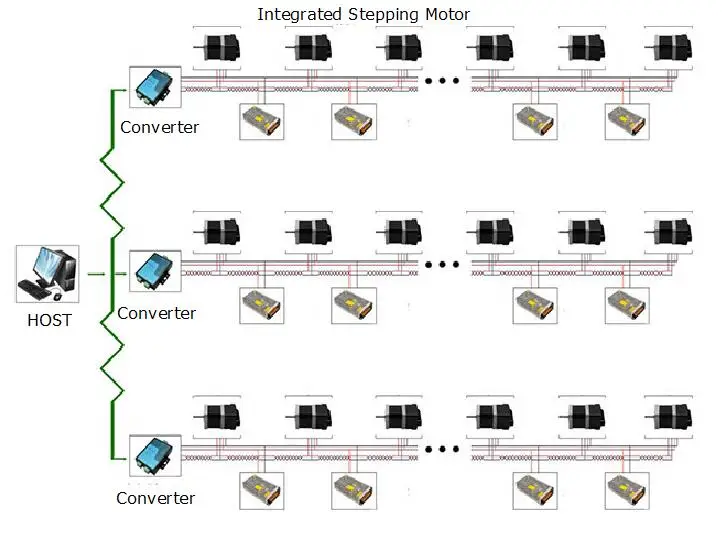
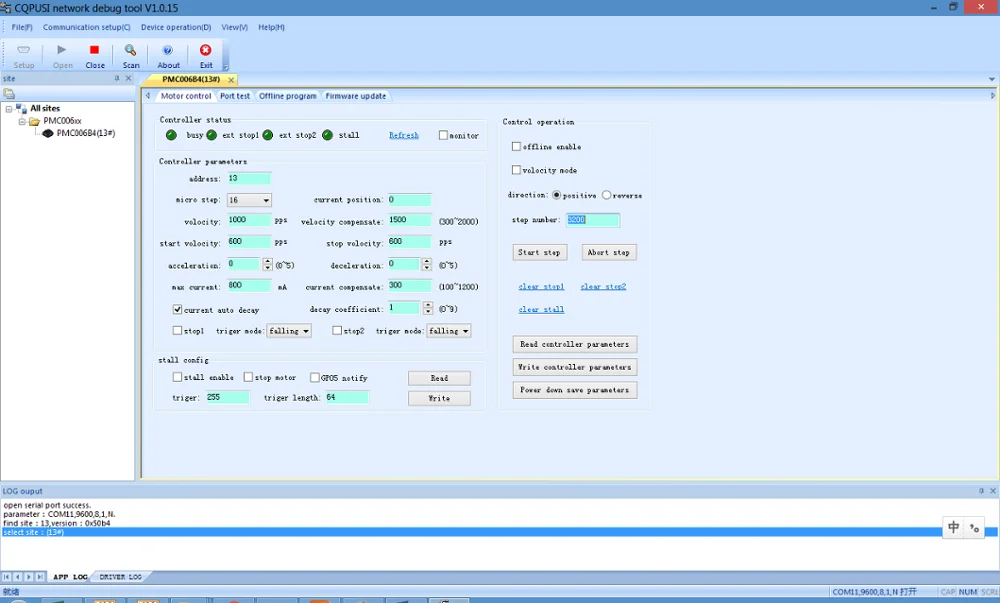
Интеллектуальная сеть CANopen: Подключение CAN bus может достигать максимальной дальности передачи 5000 метров. Он предоставляет сетевую схему, которая использует CAN bus для подключения нескольких контроллеров PMC007CxSxP на рис. 3-2, которые совместимы с CAN2.0A и CAN2.0B двумя техническими характеристиками и могут быть подключены к 127 узлам. PMC007CxSxP поддерживает стандартный протокол DS301 CANopen, cqpsi предоставляет специализированное программное обеспечение для отладки PUSICAN для отладки PMC007CxSxP network. Программное обеспечение для инструментов в настоящее время поддерживает различные модули USB2CAN, которые были основными брендами на рынке.

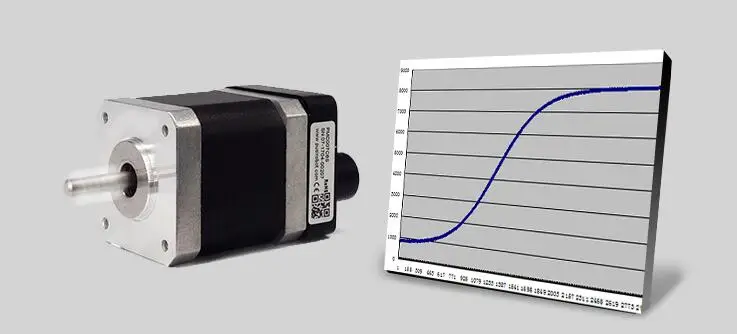
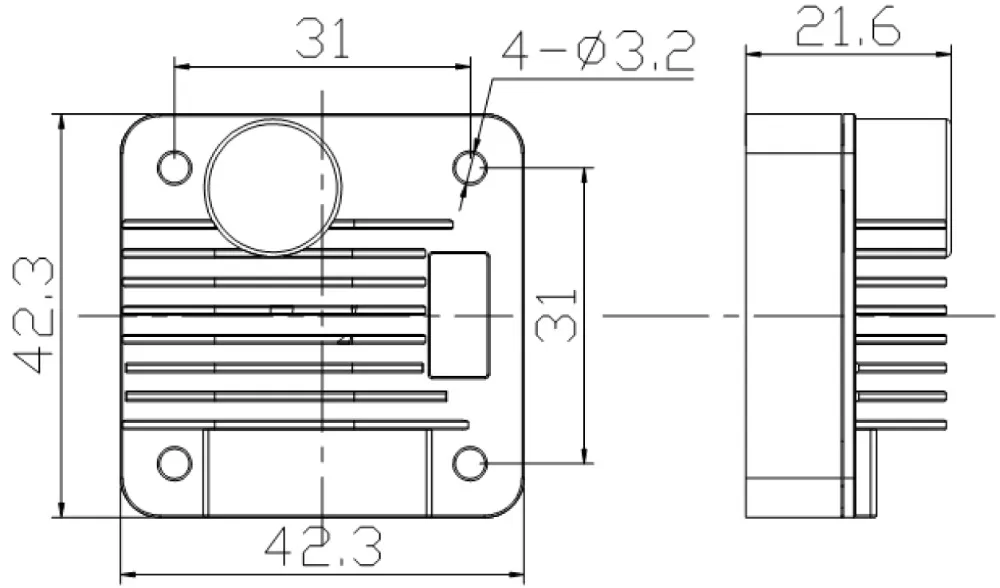
Интегрированная установка
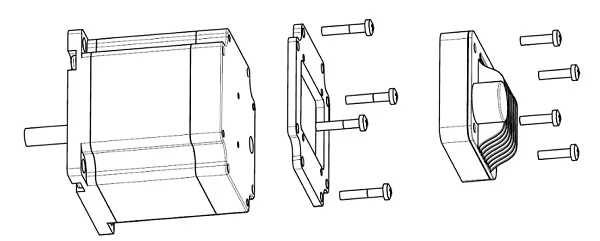
Интегрированная установка: как показано на рисунке, контроллер микрошагового двигателя PMC007 принимает высокоинтегрированный чип обработки и дизайн интегральной схемы. Общий размер контроллера составляет всего 42 мм * 42 мм * 21,6 мм, который может быть непосредственно установлен в задней частиNema 17/23Шаговый двигатель серии etc, этот метод проектирования может значительно сэкономить место установки и уменьшить жгут проводов многоблочной сети в то же время.
Множественная защита
Множественная защита: микрошаговый контроллер PMC007 принимает прецизионный алюминиевый корпус, который может способствовать защите и рассеиванию тепла. В то же время контроллер имеет несколько защитных конструкций с функциями защиты от перенапряжения, перегрузки по току и перегрева.
Простые варианты не требуют использования хост-компьютера.
Программы записываются и запускаются в автономном режиме
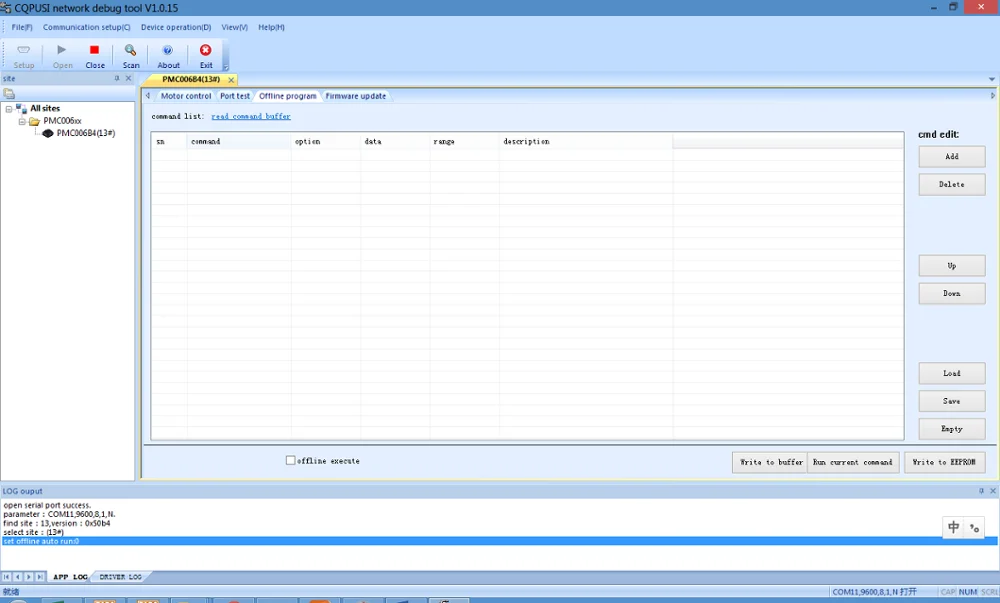
Пользовательская программа: интегрированный Драйвер шагового двигателя PMC007 может быть настроен в автономном режиме. В этом режиме контроллер автоматически выполняет пользовательский код пользователя после включения, код скомпилирован и заранее сгорел до EEPROM через программное обеспечение cqpsi. В некоторых простых сценариях применения пользователь может использовать инструмент отладки psi для записи желаемых эффектов программы в контроллер. После экономии, пользователю не нужен хост-компьютер, только нужно поставить питание к контроллеру для достижения контроля.
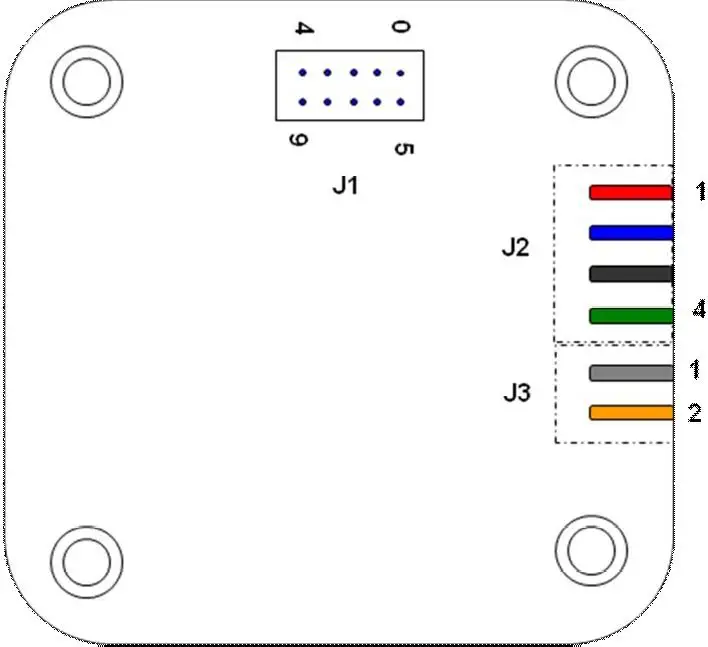
Стандартный интерфейс
|
Контактный номер: |
1 |
2 |
3 |
4 |
|
Дизайн: |
M10 |
M11 |
M20 |
M21 |
Описание:
M10,M11: фаза шагового двигателя A
M20,M21: фаза шагового двигателя B
Предупреждение: неправильное подключение питания или фазы навсегда повредит контроллер! (Соответствует красному, синему и черному, зеленому порядку в закрытом виде).
Подключение питания J3|
Контактный номер: |
1 |
2 |
|
Дизайн: |
GND |
VCC |
Описание:
VCC: напряжение питания, 12 ~ 36 В постоянного тока.
GND: Заземление напряжения питания.
Примечание:
1. Когда ток превышает 3 А, рекомендуется подключить электролитический конденсатор не менее 1000 мкФ рядом с интерфейсом J3.
2. Горячая вилка запрещена, что может навсегда повредить контроллер!
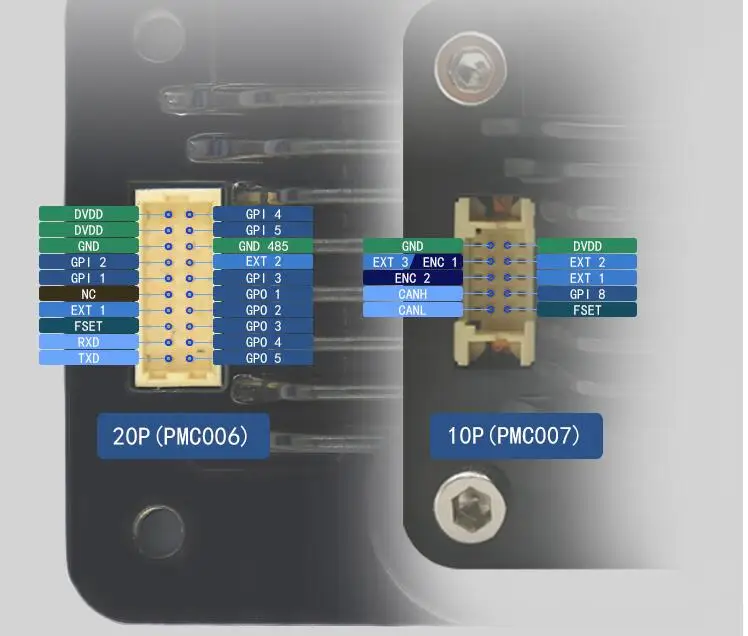
Подключение сигнала J1|
Контактный номер: |
0 |
1 |
2 |
3 |
4 |
|
Дизайн: |
GND |
Катушка + |
Катушка- |
CANH |
CANL |
|
Контактный номер: |
5 |
6 |
7 |
8 |
9 |
|
Дизайн: |
DVDD |
Аин/EXT2 |
EXT1 |
GPIO8 |
FSET |
Описание:
DVDD: выход напряжения контроллера (+ 5 В). Максимальный ток-100 мА.
GND: контроллер цифровой заземления.
EXT1: входной сигнал внешнего концевого переключателя 1, 0 ~ 24 В.
Ответ: аналоговый вход для регулировки скорости, 0 ~ 3,3 В.
GPIO8: цифровой вход и выход, 0 ~ 3,3 В.
FSET: заводской сброс ввода, 0 ~ 3,3 В. Низкий уровень эффективности.
CANH: подключение к модулю приемопередатчика CAN.
CANL: подключение к модулю приемопередатчика CAN.
Катушка +: Соленоидный клапан/тормозной блок управления, напряжение которого равно напряжению источника питания VCC.
Катушка-: Соленоидный клапан/тормозной терминал отрицательного управления.
Предупреждение: напряжение всех портов сигнала должно быть между-0,3 В ~ + 5,3 В, в противном случае это может привести к постоянному повреждению контроллера.
Ускорение и торможение s-образной кривой(Подключение непосредственно к компьютеру без других контроллеров)
Подключение
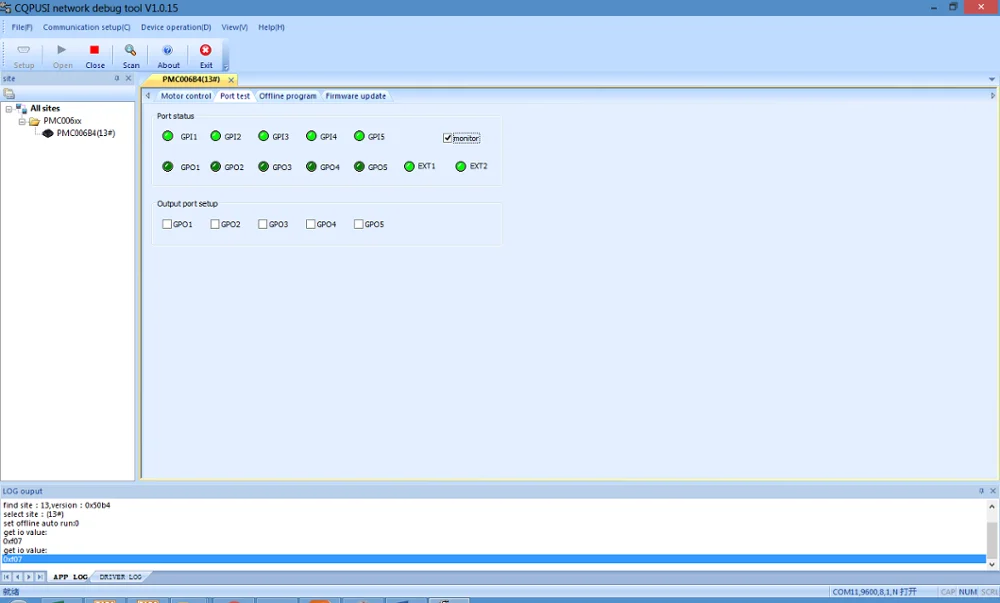
Интерфейс отладки

| Серия автобусов PMC007 | |
| Хост | ПК, ПЛК, MCU |
| Поддерживающий двигатель | Двухфазный шаговый двигатель |
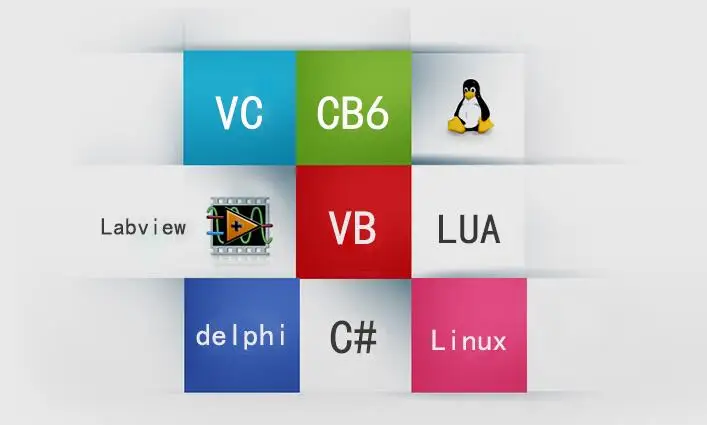
| Среда развития | VC C # Labviwe VB Linux Python |
| Напряжение источника питания | DC12-48V |
| Выходной ток |
DC 0,4-6A |
| Микрошаговый | 0/256 регулируемый |
| Температура | -20 ℃-80 ℃ |
| Максимальная частота импульса | 200K |
| Долговечность | Более 20 000 часов |
| Описание | |
| Режим управления | Режим положения, режим скорости, режим PV, режим PP, режим PVT, аналоговое регулирование скорости, аналоговое позиционирование, синхронное позиционирование |
| Переключение режимов | Указанное переключение инструкции |
| Общий ввод/вывод | Описание |
| Функция IO | Аварийный Стоп Вход, Управление тормозом, цифровой вход/выход, аналоговый вход, заводской сброс, выход 5 В |
| Входные характеристики |
Цифровое Входное напряжение: 0-5 В Аналоговое регулирование скорости Входное напряжение: 0-3,3 В Аварийное стоп Входное напряжение: 0-24 В |
| Описание | |
|
Протокол |
CANopen DS301/DS402 |
| Скорость передачи данных | 5k-1M bps |
| CAD | . DWG |
| 3D файл | . STP |
| Руководство пользователя | Флуоресцентный |
| Программное обеспечение для отладки | PUSICAN_V1.0.47.rar |
| Разработка документа | CE |

Для получения дополнительной информации перейдите на наш официальный сайт или отправьте электронное письмо на наш почтовый ящик
Смотрите так же другие товары: