
FDD UDD EX720 720KB USB SSD usb эмулятор флоппи дисковода для управления промышленным
5 728,81 руб.



Новое поступление
Характеристики
*Текущая стоимость 3 806,23 уже могла изменится. Что бы узнать актуальную цену и проверить наличие товара, нажмите "Добавить в корзину"
| Месяц | Минимальная цена | Макс. стоимость | Цена |
|---|---|---|---|
| Mar-22-2026 | 4529.95 руб. | 4755.77 руб. | 4642 руб. |
| Feb-22-2026 | 4491.24 руб. | 4716.91 руб. | 4603.5 руб. |
| Jan-22-2026 | 3768.92 руб. | 3956.68 руб. | 3862 руб. |
| Dec-22-2025 | 4415.49 руб. | 4636.57 руб. | 4525.5 руб. |
| Nov-22-2025 | 3844.13 руб. | 4036.75 руб. | 3940 руб. |
| Oct-22-2025 | 4339.34 руб. | 4556.78 руб. | 4447.5 руб. |
| Sep-22-2025 | 4301.69 руб. | 4516.79 руб. | 4408.5 руб. |
| Aug-22-2025 | 4263.34 руб. | 4476.5 руб. | 4369.5 руб. |
| Jul-22-2025 | 4225.11 руб. | 4436.21 руб. | 4330.5 руб. |
Описание товара




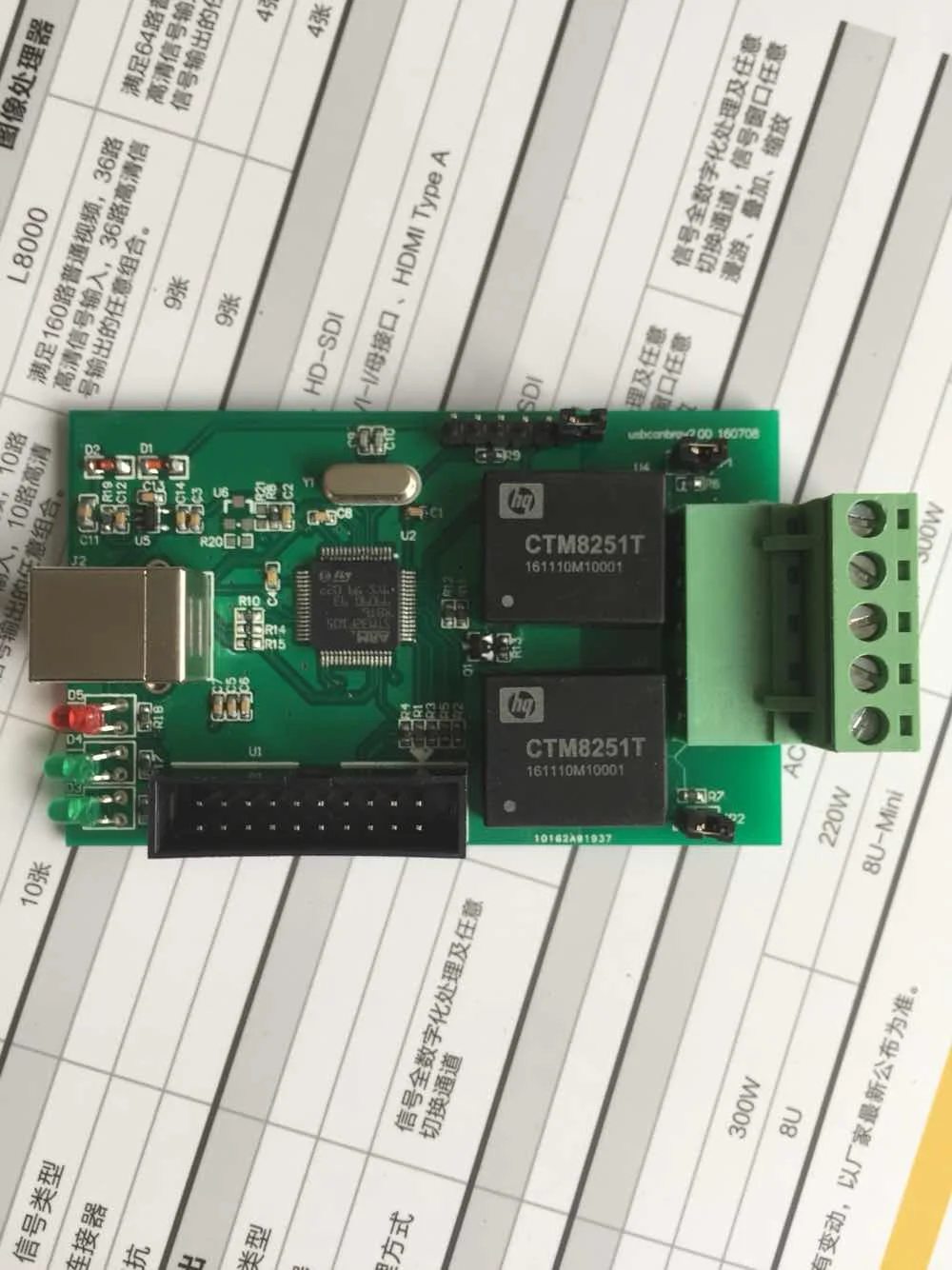
Плата разработки CAN bus dual CAN модуль STM32F105RBT6 отправка видео технологии, USBCAN, CAN реле

Использование STM32F105R8T6, с двумя банками, через USB.
Поддержка интерфейса отладки JATG и загрузка ISP.
Может использоваться для разработки Can реле, USB разработки, а также USB для разработки.
Если вы хотите быть совместимыми с другими компаниями, компания USBCAN development также может проконсультироваться с владельцем.
STM32F105 STM icroe lectron ICs компания запустила 32 ARM Co rtex на основе микроконтроллера ядра M3, его ядро специально разработано для удовлетворения высокой производительности, низкого энергопотребления, встроенных требований приложения в реальном времени. Из-за использования набора Инструкций Thumb - 2, по сравнению с микроконтроллером ARM7 скорость работы до STM32 и код может сэкономить до 45% максимум 35%. Более высокая частота и эффективность выполнения кода заставляют систему запускать алгоритм избыточности шины, в то время как данные шины CAN отправляются и получены. Микроконтроллер STM32F105 интегрирует 2 независимых контроллера CAN. Контроллер встроен в чип, что позволяет избежать помех, вызванных расширением шины.
Система использует два полностью независимых CAN-шины, два CAN-автобусных трансивера и контроллер шины для реализации физического слоя, уровня передачи данных общего избыточности. Два контроллера активируются во время инициализации, один в качестве основного, а другой в качестве резервного копирования из банки, основной контроллер. При нормальной эксплуатации данные отправляются через главный приоритет CAN; Когда автобус CAN занят, от автобуса CAN для обмена частью дорожного движения; Когда происходит ошибка главного CAN bus, передача данных с контроллера CAN для передачи и наоборот. В ШИНЕ, когда происходит ошибка, данные могут быть переданы через другой автобус, и когда два автобуса являются нормальными, используя две передачи автобуса одновременно, пропускная способность связи увеличивается примерно в 1 раз, поэтому для обеспечения надежности связи и улучшения реального времени. Технология балансировки нагрузки на две шины может улучшить пропускную способность шины и сбалансировать нагрузку на связь.Может ли протокол передачи данных и физический слой не являются частью определения целостности, диагностики и идентификации двойного избыточного приложения CAN bus для реализации мониторинга состояния, сбоя сети, это может быть выполнено путем добавления дополнительного программного обеспечения модуля. Резервный модуль вызывается в цикле основной программы, и канал трансивера переключается в соответствии с различными состояниями ошибок шины. Существует 3 типа неисправностей CAN bus: Активация ошибки, распознавание ошибок и отключение шины. Шина работает нормально в неправильном состоянии активации, контроллер обнаруживает ошибки, будет отправлять/получать значение счетчика ошибок больше 127 градусов, обязанность в неправильном распознавании, более 255 автобус закрыт, модуль обнаружения ошибок с помощью теста CAN bus, зарегистрируйте статус ошибки в качестве ошибки шины, Вызов избыточного алгоритма при изменении состояния ошибки при выполнении операции переключения шины.
Ресурсы платы:
1, плата для разработки dual CAN использует STMicroelectronics Cotex-M3 STMF105RBT6, kernel 72MHz, периферийные устройства, с USB, 2 CAN контроллером и т. д.
2, плата разработки имеет богатый интерфейс, 1 USART интерфейс (USART2, USART1, USB интерфейс занимает) 2 CAN Интерфейс (с помощью ISO1051 трансиверов), 3 светодиодный индикатор, два CAN имеет защитную цепь, выбор перемычки резистора 120. Интерфейс USB используется для передачи данных через USB и питания.(Примечание: эмулятор, используемый для загрузки, должен быть приобретен отдельно)
3. Предоставление схематической схемы в формате PDF, предоставление программы двойного трансивера CAN, светодиодный программы, программы последовательного порта, программы USB HID.
4,Список доставки: макетная плата (за исключением линий электропитания).
5,Скачать SkyDrive
Pan.baidu.com/s/1gf87H7t
Pan.baidu.com/s/1bOHrqQ
Смотрите так же другие товары:





